Kerekeken a Naprendszerben 8. rész
A Jütu, a Jütu 2 és a Pragyan
A sorozat ezen részében visszatérünk a Holdhoz és a 21. század első holdi roverjeinek történetét ismerhetjük meg. 1972 után az Egyesült Államok már nem fordított kiemelt figyelmet égi kísérőnknek és a Lunohod 2 útját követően a Szovjetunió sem indított újabb rovereket a Hold felszínére. Több mint negyven év telt el „rover mentesen” a Holdon egészen addig, amíg a 2010-es években újabb országok csatlakoztak az égitestet felfedezők közé. Kína és India egyaránt elhatározta, hogy előbb űrszondákat, majd pedig automata rovereket küld a Hold felszínére. A Jütu és a Jütu 2, valamint a Pragyan holdjárók misszióival végre folytatódhatott a holdi roverek története.
A 2000-es évek óta robbanásszerűen fejlődő Kínai Népköztársaság 2004-ben hirdette meg holdszonda programját Csang'o program néven. Az ókori kínai mitológiában Csang'o a Hold istennője volt. A program keretében űrszondákat szerettek volna eljuttatni Hold körüli pályára, valamint a Hold felszínére, amelyek segítségével Kína jobban megismerheti az égitest tulajdonságait. A program számos új technológia és módszer kifejlesztését igényelte, amelyek segítségével a Holdig való eljutás, az űreszközök követése, a stabil körpályára állás, valamint a felszínre való leszállás kivitelezhető. Azért, hogy ezeket sikeresen és a lehető leggazdaságosabban meg lehessen valósítani, a programot több fázisra bontották fel. Az első fázisban a cél a Hold körüli pálya elérése volt, ezt a Csang'o 1 űrszondával 2007-ben sikerült is elérni. Az űrszonda 2007. október 24-én indult el a Hszicsang Űrközpontból egy Hosszú Menetelés 3A (CZ-3A) hordozórakéta segítségével. A Holdat elérve stabil keringési pályára állt és műszereivel innen tanulmányozta az égitestet. A Csang'o 2 2010 októberében elődjénél sokkal részletesebben tárta fel a Hold felszínét. Ezzel a két űrszondával az első fázist sikeresen teljesítette is a kínai űrügynökség. A második fázisban következtek a felszínen landoló űrszondák. A tudományos haszon maximalizálása érdekében a leszállóegységekre egy-egy automata rovert is terveztek, amelyek részletesebben tudnák a leszállóhely területét átvizsgálni. Az első ilyen űrszonda a Csang'o 3 volt, amelynek elsődleges feladata a sima leszállás végrehajtása, valamint az első kínai holdjáró felszínre bocsátása volt. A rover elsődleges tudományos feladata a Hold felszíni és felszín alatti geológiájának felderítése, valamint a jövőben esetlegesen kitermelhető ásványi anyagok, mint a titán, az uránium és a hélium-3 izotópot tartalmazó regolit (holdpor) utáni kutatás volt. A kínai űrügynökség a korábbi rover missziók kedvező tapasztalatait felhasználva látott neki az első kínai rover megtervezésének. A fejlesztést a Kínai Űrtechnológiai Akadémia és a Sanghaji Repülési és Űrhajózási Rendszerek Tervezőintézete közösen végezte. A kínai holdprogram vezető tudósa Oujang Cejüan professzor, a főtervező Vu Vejzsen, a leszállóegység helyettes tervezője Csang Ho, a leszállóegységgel való kommunikáció helyettes tervezője pedig Szu Jen volt.
Mint több elődje a kínai holdjáró is dobozszerű testtel, hat kerékkel és rocker-bogie felfüggesztéssel rendelkezett. A rover a felfüggesztésének köszönhetően akár 30°-os lejtőket is meg tudott mászni. A könnyű szerkezetes kerekek külső felülete rugalmas fém hálóból készült, amin a menetirányra merőlegesen bordákat helyeztek el a tapadás növelése érdekében. A kerekek egyéni - a kerékagyba épített kefenélküli egyenáramú motorból és többfokozatú bolygóműves áttételből álló - meghajtással rendelkeztek. A jármű navigációs és vezérlő, illetve kommunikációs rendszerét tartalmazó doboz külsejét ezüstszínű hővédő fóliával borították be. A fólia elszigetelte a külső hideg, illetve meleg káros hatásaitól a belső berendezéseket és segített megtartani a belső hőmérsékletet. A test tetején egy némileg nagyobb méretű felülről nyitott doboz kapott helyet, amely a kihajtható két oldalsó napelem szárnyat, valamint a szintén kinyitható kamera- és antennaállványt tartalmazta. A holdi nappalon a napelem szárnyak és a kameraállvány ki voltak hajtva, a holdi éjszaka kezdete előtt pedig behajtották őket a dobozba. A felül lévő napelem szárnyat hőszigeteléssel látták el. A jármű felügyeletét és irányítását a Pekingben lévő irányító központból végezték a jármű által visszaküldött adatok alapján. A rover által visszaküldőt fényképekre és telemetriai pozíció adatokra alapozva az irányító központban virtuálisan rekonstruálták a holdi környezetet. Ennek segítségével kijelölték a rover következő célpontját és parancsokra lebontva megtervezték a rover útvonalát és feladatait. Emellett a rover önállóan is képes volt útvonalat alkotni, illetve elkerülni az útközben felmerülő akadályokat és veszélyeket. A jármű navigációs és irányító rendszere volt a felelős a jármű és a cél pozíciójának meghatározásáért, az útvonal kiválasztásáért, a lehetséges akadályok felderítéséért, a jármű mozgatásáért és a felmerülő akadályok elkerüléséért. Az aktuális pozícióját a megtett távolság és elfordulás, illetve a fényképeken a tereptárgyak elmozdulása alapján tudja a rover megállapítani. Az elkészült jármű 1,5 m hosszú, 1 méter széles, 1 méter magas és 118 kg tömegű lett, mérete nagyjából a Sojourner és a Spirit/Opportunity között félúton helyezkedik el. A jármű földi teszteléséhez felépítettek egy holdihoz hasonló tájat a Kínai Űrtechnológiai Akadémia pekingi központjában, az elkészült járművet pedig az északnyugat-kínai sivatagos területeken tesztelték.

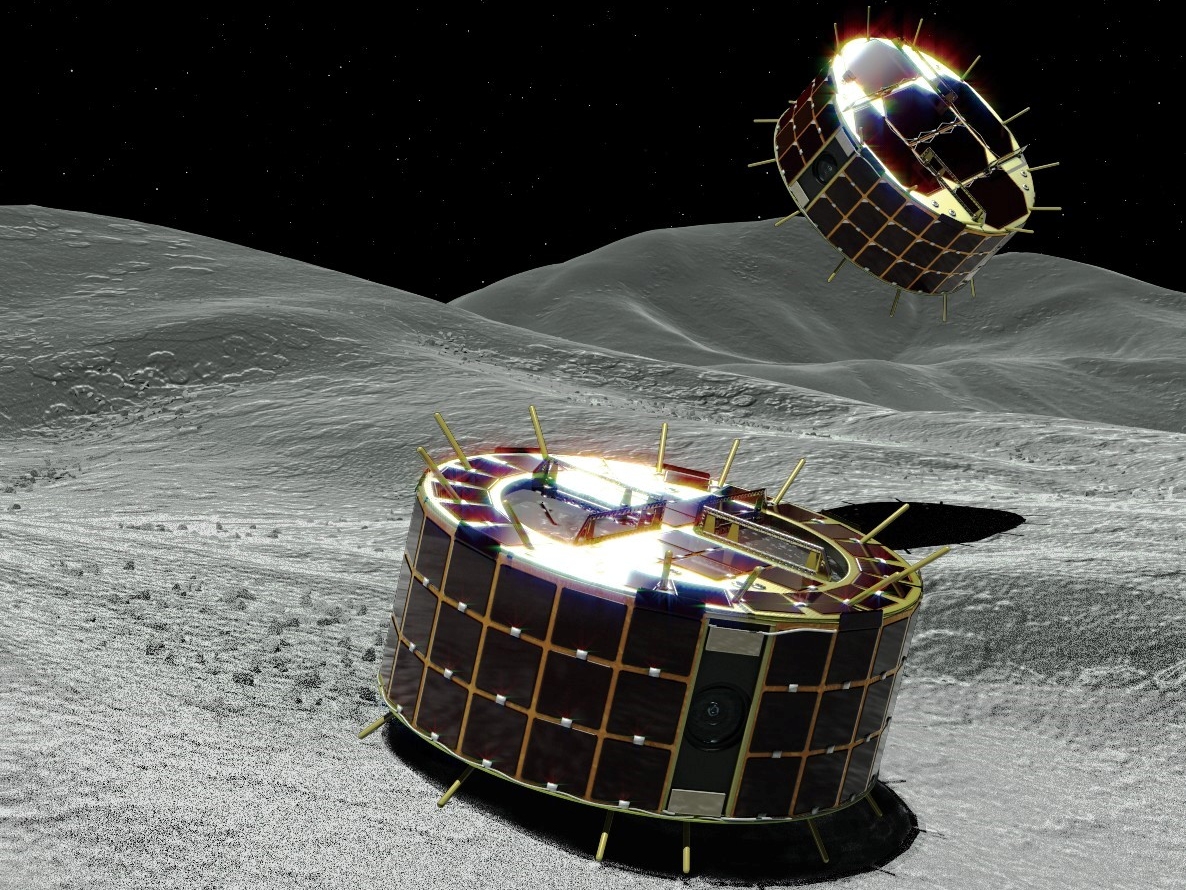
Számítógépes grafika a Csang'o 3 leszállóegységéről és a roverről a Hold felszínén.
Forrás: Beijing Institute of Spacecraft System Engineering
A Hold vizsgálatához a járművet négyféle tudományos műszerrel szerelték fel: egy sztereó kamerapárral (Panoramic Camera - PCAM), egy talajradarral (Lunar Penetrating Radar - LPR), egy látható fény/közel infravörös spektrométerrel (Visible and Near-Infrared Imaging Spectrometer – VNIS) és egy alfa-proton röntgen spektrométerrel (Active Particle-induced X-ray Spectrometer - APXS). A PCAM a kameraállványon elhelyezett két azonos felépítésű kamerából álló sztereó rendszer volt, amely a környezetről készített 3D-s fényképeket. Az LPR talajradar a rover mozgása közben a jármű alatti talaj szerkezetét derítette fel. A VNIS spektrométer a felszín ásványi összetételt vizsgálta. Az APXS spektrométerrel pedig az felszínen lévő sziklák és kövek kémiai összetételét lehetett meghatározni. A járművet felszerelték egy mozgatható robotkarral is, ennek a végén helyezték el az alfa-proton röntgen spektrométert. A jármű navigációs és veszélyelkerülő rendszerének munkáját a kameraállványon elhelyezett NAVCAM és a jármű elején elhelyezett HAZCAM sztereókamera rendszerek segítették. A rover élettartamát 90 napra, maximális hatótávját pedig 10 km-re tervezték. A rover nevét egy online szavazáson leadott, több mint 3 millió szavazat segítségével választották ki. A győztes név a Jütu, azaz Jáde nyúl lett. A név telitalálat volt, ugyanis a legenda szerint Csang’o istennő fehér kisnyulát is így hívták. A Hold istennőjének nyula pedig hol máshol érezhetné legjobban magát, mint a Hold felszínén. A leszállás helyéül a Sinus Iridum (Szivárvány öböl) nevű lapos vulkanikus síkságot választották ki. A síkság a Hold felénk néző oldalán az észak nyugati részen található Mare Imbrium (Esők tengere) északnyugati szélén helyezkedik el. A síkság kellően biztonságosnak tűnt egy sima leszállás kivitelezéséhez. A Jütu felszínre juttatásához a kínai űripar kifejlesztette az első saját gyártású, változtatható tolóerejű hajtóművét. A rovert szállító Csang’o 3 leszállóegység nagyjából 1200 kg tömegű volt. Nyolcszögletű testtel, négy lengéscsillapítóval ellátott leszállótalppal és két kinyitható napelem szárnnyal rendelkezett. A 15 km magasban kezdődő leszállás folyamatát hat szakaszra bontották fel, amiből az első három - fékezés, pályakorrekció, megközelítés - távirányítású, az utolsó három - lebegés, veszélyfelismerés, lassú leszállás pedig automata üzemmódban hajtódik majd végre. Ezalatt 28 darab fúvóka irányította a leszállóegység helyzetét, a változtatható tolóerejű hajtómű pedig 1500 és 7500 N közötti tolóerővel üzemelt.
A kínai űrügynökség nemzetközi támogatást is igénybe vett a misszió során, az európai űrügynökség (ESA) követő antennahálózata az űrszonda pontos pozíciójának meghatározásában segített. A leszállóegységet háromféle tudományos műszerrel szerelték fel: egy csillagászati UV teleszkóppal (Lunar-based Ultraviolet Telescope - LUT), egy extrém ultraviola színképtartományú kamerával, ami a Föld külső magnetoszféráját tanulmányozta és egy felszínt fotózó kamerával. A leszállóegység az autonóm üzemmódban önmaga választotta ki a végső leszállás helyét a beépített radarja segítségével. Erre azért volt szükség, mert a leszállás során csak igen rövid idő állt rendelkezésre a végső megközelítés végrehajtására. A rovert a leszállóegység tetején helyezték el és egy rámpa pár segítségével ereszkedett le a felszínre. A 14 napig tartó holdi éjszakák alatt a leszállóegység és a rover is alvó üzemmódba vált majd át. Ezalatt a beépített plutónium üzemanyagú radioizotópos fűtőegységek és kétfázisú folyékony közeget keringető csőhálózat gondoskodott a belső hőmérséklet megfelelő szinten tartásáról. A leszállóegység és a rover indításához egy Hosszú menetelés 3B (CZ-3B) hordozórakétát terveztek felhasználni, ami 300 km magasságú Föld körüli parkoló pályára juttatja majd a Csang’o 3 - Jütu párost. A Holdig való repülés 5 napig tart majd és az égitestet elérve az űrszonda több napig kering majd körülötte, mielőtt sor kerülne a leszállásra. Két azonos felépítésű leszállóegység és rover készült el, ezek közül a másodpéldányokat tartaléknak szánták. A Jütu és a Csang’o 3 2013. december 1-én 17:30-kor (világidő) indult el a dél-kínai Hszicsang Űrközpontból egy Hosszú menetelés 3B (CZ-3B) hordozórakéta tetején. Nagyjából 300 km magasan a hordozórakéta harmadik fokozatát begyújtva a rover és a leszálló egység megkezdte öt napig tartó útját a Hold felé. Az űrszonda december 6-án 9:53-kor (világidő) 361 másodperces fékezés után 100 km magasságú körpályára állt a Hold körül. A pályát néhány nap múlva egy 15 x 100 km ellipszisre változtatták, majd december 14-én megkezdődött a leszállás. 15 km magasból a Csang’o 3 fékezőhajtóművének segítségével parabola pályán 100 méterig süllyedt a felszín felett, majd lebegésbe váltott át a megfelelő leszállóhely kiválasztás érdekében. Amikor ez megtörtén a fékezőhajtómű 4 méter magasságig vitte le az űreszközt, majd kikapcsolt, a Csang’o 3 pedig szabadon esve simán landolt a felszínen 2013. december 14-én 13:11-kor (világidő). A leszállás nem tartott tovább 12 percnél. A leszállóegység az északi szélesség 44,12°, nyugati hosszúság 19,52° koordinátájú pontban lévő kb. 450 méter átmérőjű Ce Vej-nek elnevezett kráter keleti peremén ért talajt.

Startol a Jütu és a Csang’o 3 2013. december 1-én 17:30-kor (világidő) a dél-kínai Hszicsang Űrközpontból egy Hosszú menetelés 3B (CZ-3B) hordozórakéta
tetején.
Forrás: Xinhua
A sikeres landolás után a leszállóegység napelemeit kinyitották, majd következett a rover felszínre helyezése. A Jütu előbb elmászott a leszállóegység oldalánál lévő rámpákig, amelyeket egy rácsos szerkezet ekkor a leszállóegység tetejének vonalában tartott. A rover átmászott a rámpákra, majd a szerkezet a rámpákkal együtt leengedte a felszínre. Itt a Jütu lemászott a rámpákról és a történelem harmadik automata rovereként december 14-én 20:35-kor (világidő) legördült a Hold felszínére. Az első néhány nap a berendezések ellenőrzésével és műszerek bekapcsolásával telt el, december 18-ig a két űreszközön lévő műszerek háromnegyedét beüzemelték. December 15-én a Jütu és a Csang’o 3 kölcsönösen lefotózták egymást, megvizsgálva ezzel mindkét űreszköz állapotát. December 16. és 20. között a rovert elővigyázatosságból leállították, ekkor volt ugyanis legmagasabban a Nap a holdi horizonton és a hőmérséklet a felszínen elérte a +130 °C-ot. A Jütu a következő napok során félig körbejárta a leszállóegységet, majd megkezdte a leszállóhely környékén a talaj vizsgálatát a spektrométerekkel és a talajradarral. December 22-én a rover elindult dél felé. 40 méterre távolodott el a leszállóegységtől, ezalatt kipróbálták a robotkar működését, majd felkészülésként a közelgő éjszakára leparkolták a rovert, úgy hogy az egyik napelem szárny a felkelő nap irányába nézzen. A kameraállványt behajtották és ráhajtották a hőszigeteléssel ellátott másik napelem szárnyat. December 26-án kezdetét vette a misszió első holdi éjszakája és az űreszközöket hibernálták. Két héttel később, január 11-én az irányító központ sikeresen felébresztette a Jütu-t, 12-én pedig a Csang’o 3-at. A rover a második holdi nappala során folytatta tudományos programját. Körülbelül 30 méter haladt nyugat felé, majd észak felé indult és visszaért a leszállóegység közelébe. Amikor január végén elérkezett a második holdi éjszaka kezdete a Jütu már 114 megtett métert tudhatott a háta mögött. Az eltelt két holdi nappal során átlagosan 4 cm/s sebességgel mozgott. A második éjszaka előtt azonban váratlan meghibásodás adódott, ami miatt a kameraállvány behajtása és a napelem szárny becsukása nem történt meg. Ez azzal a veszéllyel fenyegetett, hogy a holdi éjszaka -180 °C-os hidege tönkreteszi a rover belső berendezéseit. Január 25-én abban a kínai médiában folyamatosan megjelenő blogban, ami a rover szemszögéből egyes szám első személyben közvetítette a missziót, a Jütu elköszönt mindenkitől a Földön. Ekkor senki sem jósolt sok esélyt arra, hogy a Jütu-t sikerül fölébreszteni a következő holdi nappal elején.
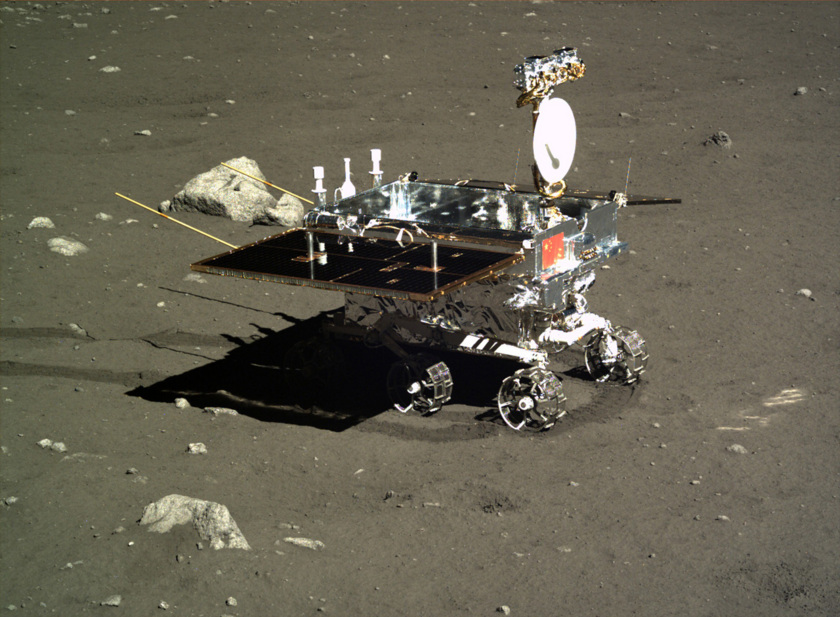
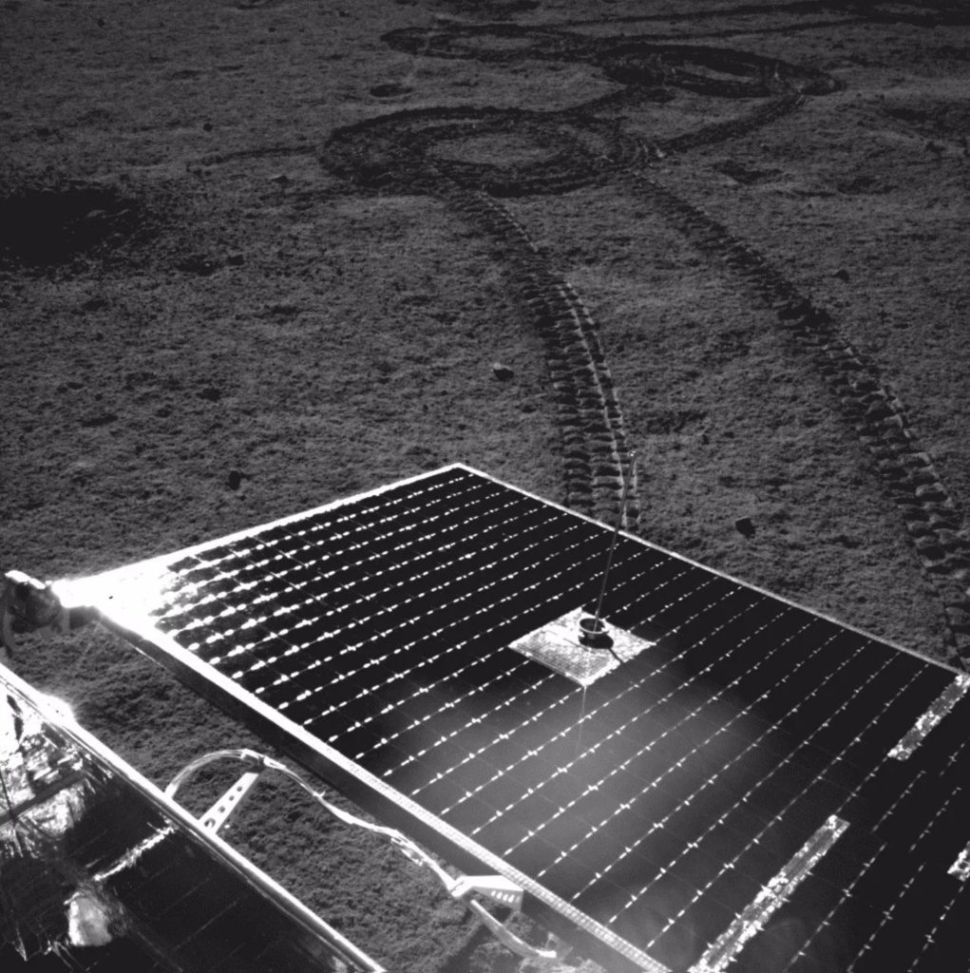
A Jütu immár a Hold felszínén.
Forrás: Chinese Academy of Sciences

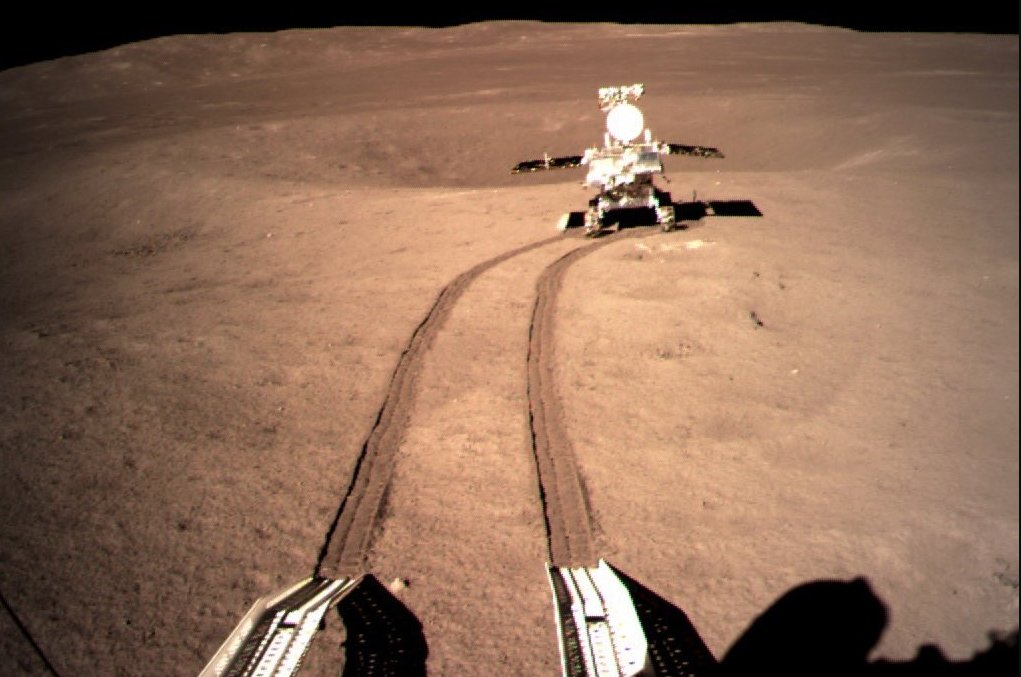
A rover visszanéz a Csang'o 3-ra.
Forrás: Chinese Academy of Sciences
A holdi éjszaka során a kínai szakemberek folyamatosan dolgoztak a hiba kiderítésén és idővel rájöttek arra, hogy az egyik elektromos áramkörben keletkezett zárlat okozhatta a problémát. Emiatt a jármű képtelen volt becsukni a kamera állványt és azt a napelem panelt, ami a hőszigetelést biztosította volna, ráadásul képtelen volt a továbbiakban mozgatni a kerekeit. A tervezés során megbízhatóság növelése érdekében minden elektromos rendszert két azonos hálózattal láttak el, amelyek közül a tartalék át tudta venni a fő hálózat helyét, ha az meghibásodik. Sajnos azonban valamilyen sokkal komplexebb probléma sújtotta a mozgató motorok áramkörét, amin nem tudott ez a redundancia segíteni. A Jütu örökre lebénult. Öröm az ürömben, hogy a jármű műszereit és kommunikációs rendszerét nem érintette a probléma, így továbbra is tudott kommunikálni a Földdel, illetve fotókat készíteni és méréseket végezni. Február 12-én végül ismét sikerült felvenni a kapcsolatot a roverrel és kezdetét vette egy alternatív tudományos program. A 2014-es, 2015-ös és 2016-os év folyamán az irányító központ személyzete folyamatosan figyelte a rover állapotát és értékes információkat szerzett a berendezések állapotának változásáról, illetve a jármű élettartamáról. 2016. augusztus 3-án, 972 nap után a rover már nem válaszolt többet a hívásokra. A több mint 31 hónapos működésével a Jütu lett a leghosszabb ideig Holdon tevékenykedő rover, megelőzve a Lunohod 1-et. Közben a Csang’o 3 is jóval túlszárnyalta a tervezett egy éves élettartamát. A misszió során a szakemberek 7 terabyte-nyi adatot kaptak vissza az űreszközöktől, amely alapján a következő tudományos megállapításokat tették. A leszállóhely környéke alatt 4 - 6 méter vastag a regolit (holdpor) réteg, az alatt pedig egy 300 méter vastag bazalt réteg fekszik. A bazalt réteg kialakulása egy körülbelül 2,1 milliárd év hosszúságú időszakon belül történhetett meg, ami 3,2 milliárd évvel ezelőtt vette kezdetét az akkor még működő vulkanizmus hatására. A bazaltréteg gazdag titándioxidban, vasban, magnézium-oxidokban, vas-tartalmú olivinben és kalciumot tartalmazó ásványokban. Ez arra enged következtetni, hogy a bazaltréteg a vulkanizmus kései szakaszában keletkezett és eltér attól a bazalttól, amit az Apollo program missziói során, a Hold felszínén találtak az asztronauták. A LUT csillagászati UV teleszkóp kevesebb hidroxid-iont talált a Hold vékony exoszférájában, mint azt a korábbi indiai holdszonda, a Chandrayaan 1 és a Hubble Űrtávcső spektroszkóp mérései alapján várták. Ez azt az állítás támasztja alá, hogy a szilikátos kőzetekben abszorbeált hidroxid-ionok és vízmolekulák a napszél nagyenergiájú protonjainak porlasztó hatására kiléphetnek a kőzetekből az exoszférába a holdi nappalok során. A talajradar mérései alapján a titándioxid és vasoxid tartalom a regolitban 22 és 30 tömegszázalék között változik. A VNIR adatai alapján a talaj klinopiroxéneket, ortopiroxéneket, olivint, plagioklászokat és törmelékköveket tartalmaz.

Látkép a Mare Imbrium-ról.
Forrás: Chinese Academy of Sciences
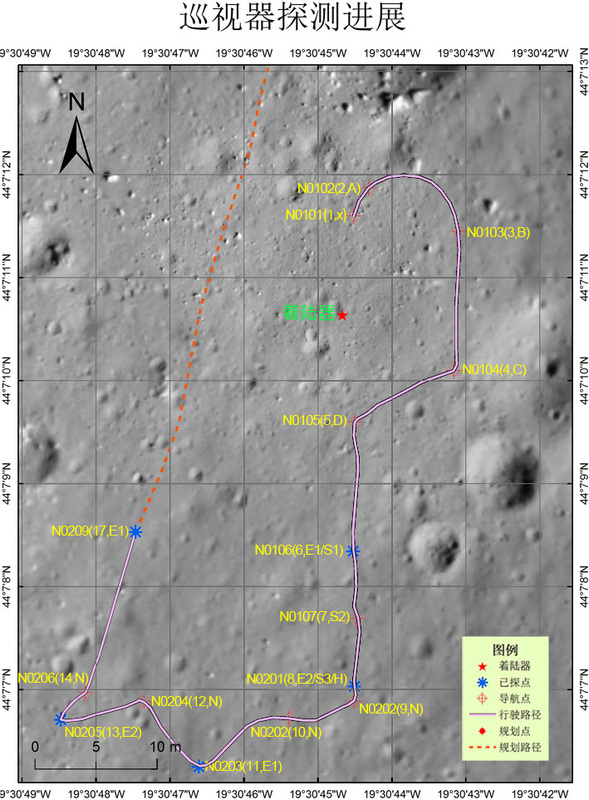
Térkép a Jütu útvonaláról. A piros csillag jelzi a Csang'o 3 leszállóhelyét, a folyamatos vonal a jármű által megtett utat,
a szagatott vonal pedig a tervezett további útvonalat, amit a Jütu a meghibásodása miatt már nem tudott bejárni.
Forrás: National Astronomy Observatory of China
Az sikeres Csang’o program folytatása nem maradt el és a kínai űrügynökség már 2015-ben bejelentette a következő missziót, a Csang’o 4-et. Mivel az előző leszállóegység és rover tartalékjai tökéletes állapotban voltak az űrügynökség úgy döntött, hogy őket használja fel a Csang’o 4 repüléséhez. Így a misszió költségeit is sikerült féken tartani, ami nagyjából 72,6 és 172,4 millió dollár közötti összegbe került. Emellett azonban a kínai szakemberek léptek egy merészet előre és a leszállóhelyet a Hold túlsó oldalra tűzték ki, oda ahol azelőtt még nem járt semmilyen ember alkotta eszköz. A Hold túlsó oldala eltérő a Földről látható oldaltól, felülete sokkal egyetlenebb és sokkal kevesebb bazaltmedence - Mare (tenger) - helyezkedik el rajta. A Földről látható oldalhoz hasonlóan itt is 14-14 naponta váltja egymást a holdi nappal és éjszaka. A leszállás nehézségét itt az jelenti, hogy az űrszonda nem tud közvetlenül kommunikálni a Földdel a Hold árnyékolóhatása miatt. Ezért a kínai űrügynökség megtervezett egy átjátszó műholdat, amelyet a Föld - Hold rendszer L2-es Lagrange pontja közelébe terveztek eljutatni. A Lagrange pontok olyan helyek a Föld és Hold rendszerben, amelyeknél a két égitest gravitációs vonzása kiegyenlíti egymást, így az ide eljutatott űreszköz kis túlzással élve örökre stabilan ezen a ponton marad. Az L2 pont a Földet a Holddal összekötő vonalon, a Hold pályáján túl, nagyjából 440 000 km-re helyezkedik el a Földtől. Az L2-pontban műhold úgy helyezkedik majd el, hogy egyszerre lássa a Hold túlsó oldalát és a Földet is. A Csang’o 4 tudományos feladatai között szerepelt a Hold felszínéről történő csillagászati megfigyelés egy alacsony frekvenciás rádióteleszkóppal, a leszállóhely környezetének feltárása, ásványi összetétel és felszíni szerkezet vizsgálata, valamint a felszíni részecskesugárzási spektrum analízise. A Hold túlsó oldala mentes a Nap és a Föld zavaró elektromágneses hatásaitól, ezért tökéletes lehetőség nyílik az égbolt tanulmányozására a rádióteleszkóppal. A hatkerekű, rocker-bogie felfüggesztésű, 1,5 m hosszú, 1 méter széles, 1 méter magas és 140 kg tömegű rover felépítését az előd Jütu-tól kapta, de javítottak a szerkezeti megbízhatóságán. A rover egy panoráma kamerapárral (Panoramic Camera - PCAM), egy talajradarral (Lunar Penetrating Radar - LPR), egy látható fény/közel infravörös spektrométerrel (Visible and Near-Infrared Imaging Spectrometer - VNIS) és egy semleges részecske detektorral volt felszerelve (Advanced Small Analyser for Neutrals - ASAN).
A PCAM kamerák a rover kamera- és antennaállványán helyezkednek el és 360 °-ban körbe forgathatóak. 3D-s képeket készítenek színes és pánkromatikus (a fekete-fehér fényképfilmek olyan típusa, amely a látható fény minden hullámhosszára érzékeny) üzemmódban. A kamerák látószöge 19,7 x 14,5 °-os, minimálisan legalább 3 méterre lévő tárgyakra képesek fókuszálni. Az LPR egy ultraszéles sávú, nanoszekundumos impulzusú radar bistatikus antennákkal. Két csatornával rendelkezik. Egyes csatornája 40 - 80 MHz frekvenciatartományban működik és 100 méternél is lejjebb képes felderíteni a talajt egy méteres felbontással. Kettes csatornája 250 - 750 MHz frekvencia tartományú és 30 méter mélységig 30 cm-es felbontással üzemel. A VNIS spektrométer látható fény és közel infravörös fény üzemmódban használható. Mivel a VNIS látószöge viszonylag kicsi, 8,5°-os, ezért a pozicionálásában a NAVCAM és HAZCAM sztereókamera rendszerek segítenek. Az ASAN semleges részecske detektort a svéd Űrfizikai Intézet és a Kínai Tudományos Akadémia Nemzeti Űrtudományi Központja közösen fejlesztették ki. 10 eV és 10 keV közötti energiájú részecskéket képes érzékelni. A rover irányítása teljesen azonos módon történik, mint az elődjéé. A pekingi irányító központ a rover visszaküldött adatai alapján tervezi meg a jármű útvonalát, emellett a jármű autonóm módon is képes útvonalat kiválasztani, illetve akadályokat kikerülni. Mindkét üzemmód a NAVCAM és a HAZCAM sztereó kamerarendszerek képeire támaszkodik. A NAVCAM a PCAM mellett kapott helyet a kameraállványon, 1024 x 1024 pixel felbontású képeket készít, 46,6 °-os látószöggel. A HAZCAM kamerái a jármű elején kaptak helyet, szintén 1024 x 1024 pixel felbontású képeket készítettek 120°-os látószöggel. Míg a NAVCAM a kameraállvány segítségével 360 °-ban körbeforgatható, addig a HAZCAM kamerák fixen kerültek beépítésre.
A nagyjából 1200 kg-os leszállóegység elődjéhez hasonlóan egy hat szakaszból álló folyamattal ér majd talajt. A leszállóegység négy műszert vitt magával; két kamerarendszert (Landing Camera - LCAM, Terrain Camera - TCAM), egy alacsonyfrekvenciás spektrométert (Low-Frequency Spectrometer - LFS) és egy neutronsugárzás analizátort (Lunar Lander Neutrons and Dosimetry - LND). Az LCAM a leszállás közben a TCAM a leszállás után tanulmányozza majd a felszín morfológiáját és geológiáját. Az LCAM a leszállóegység alján helyezkedik el és a felszín felé néz. A CMOS érzékelővel rendelkező kamera 1024 x 1024 pixel felbontású képeket készít 10 fps frekvenciával a leszállás közben. 12 km magasságban lép működésbe és egészen a leszállás végéig dolgozik. A kamera 45 °-os látószöggel és 4 m minimális fókuszálási távolsággal rendelkezik. A TCAM egy nagyfelbontású színes CMOS kamera, amelyet 360 °-ban körbe lehet forgatni, illetve fel és le 120 °-ban meg lehet dönteni. A kamera a leszállóegység tetején, egy állványon van elhelyezve. Feladatta a környezet fotózása, környezeti térképek készítése és a rover megfigyelése. 2352 x 1728 pixel felbontású képeket készít, 22,9 x 16,9 °-os látószöggel és 5 m minimális fókuszálási távolsággal rendelkezik. Az LFS 0,1 - 40 MHz tartományban vizsgálja a holdi ionoszférát és a csillagokból származó alacsonyfrekvenciás elektromágneses sugárzást. Három antennája az elektromágneses sugárzás három egymásra merőleges komponensét méri, továbbá olyan jellemzők meghatározására szolgál, mint például az elektromágneses sűrűség, frekvencia spektrum, időben történő változás, polarizációs jellemzők és kibocsátási irány. Az LND a felszínt érő sugárzási spektrumot és részecske fluxust méri. Az LDN 10 darab szilikon SSD detektorával 7 - 30 MeV energiájú protonokat, 60 - 500 keV energiájú elektronokat, 7 - 20 MeV/n energiájú alfa részecskéket és 10 - 30 MeV/n energiájú nehéz ionokat tud detektálni. Emellett két detektora 2 - 20 MeV energiájú gyors neutronokat is tud mérni. A műszert a Kieli Egyetem és a Kínai Tudományos Akadémia Nemzeti Űrtudományi Központja közösen készítette. A műszerek áramellátását, vezérlését, az adatok begyűjtését és tárolását, valamint továbbítását a leszállóegységen és a roveren elhelyezett un. rakomány vezérlőpanelek biztosítják. A leszállóegységen ezen kívül biológia kísérletek is helyet kaptak. Egy 18 cm hosszú alumínium konténerben krumpli csírákat, mustármagokat és selyemlepke petéket helyeztek el. A konténer megtervezésében 28 egyetem vett részt. A konténerben szerettek volna egy mikro ökoszisztémát létrehozni: a selyemlepkék hernyói széndioxidot termelnek majd, amit a növényi magok és csírák fotószintézis során oxigénné alakítanak vissza. A leszállóegység élettartamát egy évre, a roverét három hónapra tervezték, de az elődök tapasztalatai alapján a kínai szakemberek remélték, hogy most is sikerül ezeket majd túlszárnyalni.
A megfelelő leszállóhely kiválasztásában a Kínai Tudományos Akadémia Holdat és mélyűrt tanulmányozó laboratóriuma és a Kínai Űrtechnológiai Akadémia 5. osztálya közösen vett részt. A cél olyan területek kiválasztása volt, ahol 8 °-osnál kisebbek a lejtők és az északi, illetve déli szélesség 30 - 55 °, valamint keleti, illetve nyugati hosszúság 110 - 180 ° által meghatározott területeken fekszenek. Kilenc darab leszállóhely jelöltet választottak ki, ebből négy az északi féltekén, öt pedig a déli féltekén helyezkedett el. Végül a Csang’o 4 leszállóhelyének a 2300 km átmérőjű Déli pólus – Aitken-medencében lévő Von Kármán-krátert jelölték ki. A Déli pólus – Aitken-medence a legöregebb becsapódási kráter a Naprendszerben, ami legalább 3,9 milliárd éves. Az aszteroida, ami kialakította 170 km átmérőjű lehetett. A medence alja nagyjából 13 km-re van lejjebb, mint a medencét körbevevő felföldek. A szakemberek szerint itt elég vékony a Hold kérge ahhoz, hogy néhány becsapódás felszínre hozhatta a holdi köpeny anyagát, amit eddig még nem sikerült tanulmányozni. Emellett a korábbi mérések szerint ezen a területen magasabb a vas, titán és tórium eloszlás, mint a környező területeken, ami szintén vonzó célponttá tette a Déli pólus – Aitken-medencét. A 186 km átmérőjű Von Kármán-kráter a medence észak nyugati részén található. A krátert egy korábbi időszakban bazalt töltötte fel, majd a közelben becsapódó meteoritok által felszaggatott holdfelszín darabjai borították be. A Csang’o 4 misszió harmadik eleme, a kommunikációs átjátszó műhold 425 kg tömegű, teljes élettartamát 5 évre tervezik. A műhold 4,2 méteres X-sávú nagy hatótávolságú parabolaantennája segítségével tartja a kapcsolatot a leszállóegységgel és a roverrel, illetve egy közepes-nyereségű S-sávú antennával kommunikál a Földel. Emellett a műholdat felszerelték egy alacsony frekvenciás rádióteleszkóppal is (Netherlands-China Low-Frequency Explorer – NCLE). Az NCLE alacsonyfrekvenciás rádióteleszkóp 10 MHz frekvencia alatti tartományban működik. Segítségével valószínűleg megfigyelhetőek lesznek a közeli csillagokban bekövetkező alacsonyfrekvenciás elektromágneses kitörések. Továbbá a földi sarki fény és a Jupiter által kibocsátott, valamint a Nagy-bumm után hátra maradt alacsonyfrekvenciás elektromágneses sugárzást is érzékelni tudja. A műszer a holland Radboud Egyetem és a Kínai Tudományos Akadémia Nemzeti Csillagászati Obszervatóriumának közös fejlesztése. Az NCLE-el való vizsgálatok a leszállóegység landolása után kezdődtek el. Az átjátszó műholdat Csüecsiao-nak (Szarka híd) nevezték el egy kínai mítosz alapján. A műhold két mikró műholdat is vitt magával, a Lungcsiang (Vizi sárkány) 1 és 2-őt. A 45 kg-os, 50 x 50 x 40 cm-es műholdak a tervek szerint 300 x 9000 km-es pályára álltak volna a Hold körül. A mikro műholdakat a Harbini Technológiai Intézet készítette. Egyméteres antennáikkal alacsonyfrekvenciás elektromágneses vizsgálatokat és amatőr rádiós műveleteket tudtak végezni, szaúd-arábiai diákok által fejlesztett kameráikkal pedig fényképeket tudtak készíteni.

Indul a Csüecsiao 2018. május 20-án egy CZ-4C hordozórakéta segítségével a Hszicsang Űrközpontból.
Forrás: NASA Spaceflight.com

Startol a Csang'o 4 és a Jütu 2 is 2018. december 7-én szintén a Hszicsang Űrközpontból egy CZ-3B hordozórakéta tetején.
Forrás: Xinhua
A Csüecsiao két úton juthatott el az L2 pontba. Az első a direkt megközelítés, amely nagyjából 96 órát vesz igénybe és a Földet elhagyó műhold egyből az L2 pontba repül. A második útvonal a holdi hintamanőver, amely sokkal lassabb - 232 órába telik - de kevesebb energiát igényel, mint a direkt megközelítés. Ekkor a Földről induló műhold elhagyja a Föld körzetét, majd ahogy folyamatosan lassul, a Hold gravitációja magához húzza azt. A műhold elkezd zuhanni a Hold felé, közben pedig eléri azt a sebességet ami már elég nagy ahhoz, hogy ne zuhanjon le annak felszínére és ne is álljon pályára körülötte, hanem továbbhaladjon az L2 pontba. A Csüecsiao az utóbbi útvonalat használta. A műhold fellövéséhez egy Hosszú Menetelés 4C (CZ-4C) hordozórakétát használtak. A Hszicsang Űrközpontból május 20-án 21:28-kor (világidő) startoló műhold 25 perccel a fellövést követően el is vált a hordozórakéta utolsó fokozatától és megkezdte a Holdig való repülést. Május 21-én megtörtént a Lungcsiang 1 és 2 pályára állítása. Május 22-én és 25-én a Csüecsiao pályakorrekciókat hajtott végre. 25-én mindkét mikro műhold fékezni kezdett, de csak a Lungcsiang 2-nek sikerült 350 x 13 700 km-es ellipszispályára állnia a Hold körül. A Csüecsiao május 28-án 100 km-re halad el a Hold felszínétől, majd május 29-én érte el az L2 pont környezetét és június 14-ig több pályakorrekcióval egy 60 000 x 80 000 km ellipszis pályára állt a pont körül. A műhold összesen 24 nap alatt érte el az L2-es Lagrange-pont környezetét. A földi oldalon a műholddal való kommunikációt több újonnan létesített követőállomás és a Csendes-óceánon lévő Jüanvang 7 követőhajó biztosította. Ezután már minden készen állt a Csang’o 4 indításához. A leszállóegység és a rover páros 2018. december 7-én 18:23-kor (világidő) indult a Hszicsang Űrközpontból egy Hosszú Menetelés 3B (CZ-3B) hordozórakéta segítségével. A két űreszköz 12-én érte el a Hold körüli pályát. Két pályakorrekció után tesztelték a Csüecsiao-val való kommunikációt, majd a páros több mint két hétig maradt a körpályán. 2019. január 3-án 2:26-kor (világidő) a Csang’o 4 leszállóegysége sikeresen landolt a 186 km átmérőjű Von Kármán-kráterben a déli szélesség 45,46 ° keleti hosszúság 177,59 ° koordinátájú pontban. Ezzel az első űreszközzé vált, amely sikeres landolást hajtott végre a Hold túlsó oldalán. A rover elnevezésére ismét online szavazást írtak ki, aminek az eredményét a sikeres leszállás után hozták nyilvánosságra. Nem meglepően az új jármű neve Jütu 2 lett. A leszállás helyét pedig Tienho állomásnak nevezték el. A leszállás napján a Jütu 2 az elődjéhez hasonló rámpás megoldással leért a talajra és a Hold túlsó oldalán tevékenykedő az első járműként megkezdte tudományos programjának végrehajtását.
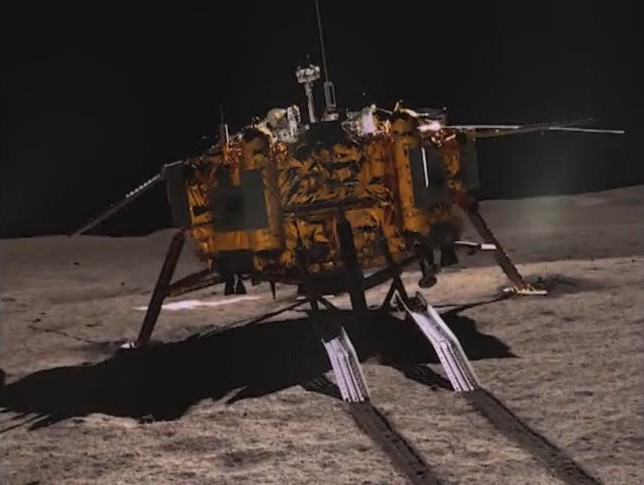
A Csang'o 4 a Hold felszínén.
Forrás: CNSA/CLEP
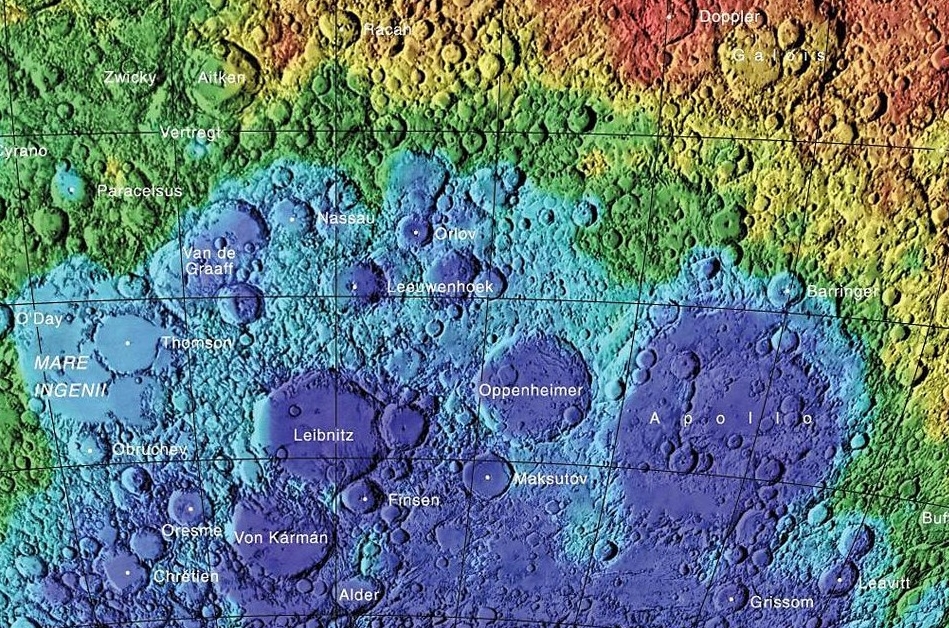
A Csang'o 4 és a Jütu 2 leszállóhelyének, a Von Kármán-kráternek az elhelyezkedése a Déli pólus – Aitken-medencén belül.
Forrás: NASA Spaceflight.com
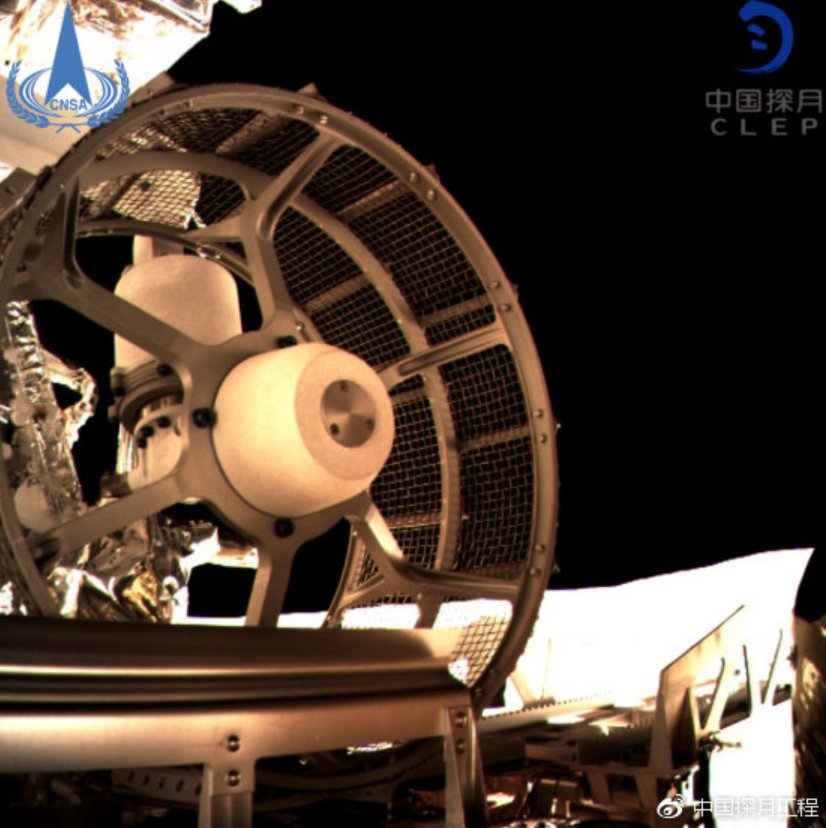
A Jütu 2 kerekének szerkezete. A képen a jármű még a leszállóegység tetején várja, hogy a rámpa lereszkedjen vele a felszínre.
Forrás: CNSA/CLEP
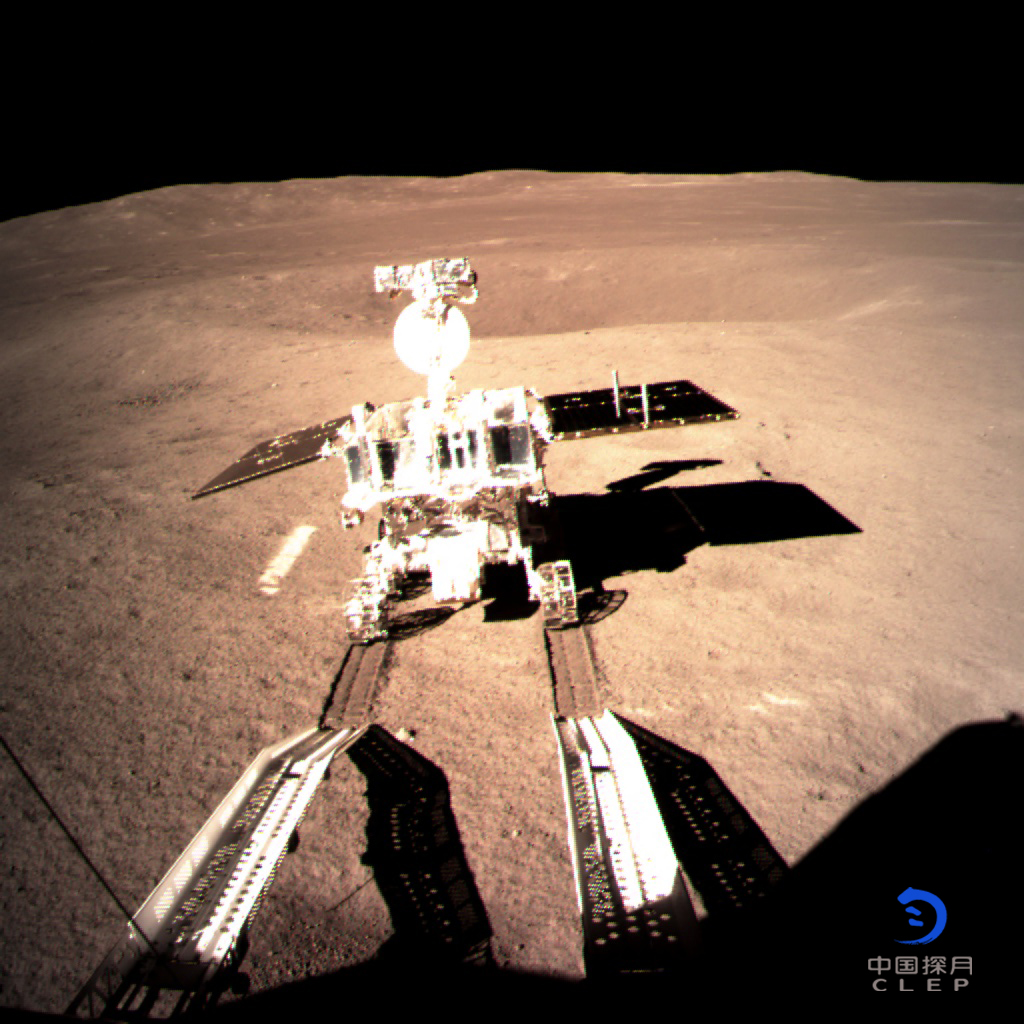
A Jütu 2, immáron a Hold felszínén, megteszi első métereit.
Forrás: CNSA/CLEP
Az első holdi nap során (január 1. - 28.) a rover déli irányban néhány méterre távolodott el a leszállóegységtől és itt töltötte a január 4. - 10. közötti időszakot. Ekkor delelt a Nap a holdi horizonton és a felszíni hőmérséklet elérte a +130 °C-ot. Ezen időszakokat a túlmelegedés elkerülése érdekében mindig egyhelyben töltötte a rover. Ezt követően a Jütu 2 január 11. és 14. között észak felé indult, elhaladt a leszállóegység mellett, majd eljött az első holdi éjszaka kezdete és a rovert felkészítették az éjszakára. A járművet úgy parkolták le, hogy a felkelő Nap sugarai közvetlenül megvilágítsák majd az egyik oldal napelemeit, ezután behajtották a kameraállványt és a napelem szárnyakat és hibernálták a járművet és a leszállóegységet is. Az első éjszaka során -190 °C-ot mértek az orosz fejlesztésű radioizotópos termo elektromos generátor által üzemeltetett hőmérővel. A Jütu 2 a 2. holdi napon (január 29. - február 27.) január 30-án indult el ismét és február 1-ig északnyugati irányba haladt. Február 1. és 7. között a Nap a legmagasabban állt a horizonton, ezalatt a jármű pihent. Február 8. és 11. között a rover egy bal, majd jobb kanyar beiktatásával nyugatira változtatta az irányát. 11-ig összesen mintegy 120 métert tett meg holdi tartózkodása alatt, ezzel túlszárnyalta az elődje, a Jütu által összesen megtett 114 métert. A következő nappalon (3. holdi nap: február 28. - március 27.) február 28. és március 3. között a Jütu 2 összesen hét métert tett meg, közben pedig megvizsgált egy 20 cm-es sziklát a spektrométerével. Március 3. és 10. között lekapcsolták a rendszereit a magasán álló Napból érkező hő miatt. Március 13-án pedig megkezdődött a harmadik éjszaka. A harmadik holdi nappala során a Jütu 2 mintegy 43 métert tett meg északnyugat felé és a holdi nap végén elérte tervezett élettartamát. Három holdi nap alatt összesen 163 métert tett meg. Mivel a jármű kifogástalan állapotban volt, nem volt kérdés a sikeres misszió folytatása. Az elkövetkező két nap során (4. holdi nap: március 28. - április 26., 5. holdi nap: április 27. - május 26.) a jármű folytatta az útját északnyugati irányban. Májusban a rover olyan kőzeteket talált, amelyekben olivin és alacsony kalcium tartalmú piroxén található. Ezek a jellemzők a szakemberek szerint arra utalnak, hogy az adott kőzetek a Hold köpenyéből származnak és az Aitken-medencében lévő 72 km átmérőjű Finsen-krátert kialakító becsapódás dobhatta őket a felszínre. A 6. holdi nap (május 27. - június 25.) során a kozmikus sugárzás miatti interferencia zavarta a Csüecsiao-val való kommunikációt és a rover számítógépének működését. A holdi éjszaka közeledtével június 9-én reggel hibernálták az űreszközöket. A Jütu 2 által eddig megtett teljes távolság 212,99 méter volt, a jármű pedig északra volt a Tienho állomástól. Június 27-én hajnalban 1:26-kor a Jütu 2, este 21:45-kor pedig a Csang’o 4 kapott ébresztőt. A 7. holdi nap során (június 26. - július 24.) A rover folytatta útját nyugat felé. A 8. holdi nap alatt (július 25. - augusztus 23.) a Jütu 2 szintén nyugat felé haladt, július 28-án átgurult egy nagyjából 2 méter átmérőjű kráter felett, ahol egy érdekes, szokatlan színű, gél állagúra emlékeztető kinézetű anyagot talált. A rover megállt és elkezdte tanulmányozni az ismeretlen anyagot. A VNIS műszerrel kétszer is megvizsgálta az anyagot, a második mérés augusztusban rossz megvilágítási viszonyok között zajlott le. Az anyagról később kiderült, hogy legnagyobb valószínűség szerint becsapódás során keletkezett üveg. Hasonló ahhoz Sample 70019 nevű mintához, amit az Apollo 17 missziója során Harrison "Jack" Schmitt űrhajós gyűjtött be 1972 decemberében. Ezen holdi nap alatt a jármű 33,13 métert tett meg. Szintén ezen a holdi nap során – augusztusban - a korábban Hold körüli pályára állt Lungcsiang 2 becsapódott a Hold felszínébe.

Kisméretű kráter a negyedik holdi nappalról.
Forrás: CNSA/CLEP
A Jütu 2 egyik napeleme és a hatodik holdi nappal során megtett út nyomai.
Forrás: CNSA/CLEP

Az üvegszerű anyag, amit a Jütu 2 a nyolcadik holdi nappal során talált.
Forrás: CNSA/CLEP

A Lungcsiang 2 fotója a Földről és a Hold felszínének egy részéről.
Forrás: CNSA/CLEP/KACST
A 13. holdi napon (2019. december 19. - 2020. január 17.) a Marsra érkezés első évfordulóját ünnepelhette a Jütu 2. A távolságmérő ekkor 357,695 métert mutatott. A február 17-én kezdődő 15. holdi nap során (február 17. - március 16.) a Jütu 2 32,54 métert tett meg, előbb északnyugati, majd délnyugati irányba. Ezzel a Hold felszínén összesen megtett távolság elérte a 400 métert. A 16. holdi napon (március 17. - április 15.) a rover északnyugat felé haladt, miközben a leszállóegység rádióteleszkópos vizsgálatokat végzett. A 19. holdi nap (június 14. - július 13.) reggelén a rover átvizsgált egy kisméretű krátert, amiben fényt visszaverő anyagot, lehetséges megolvadt üveget talált. A 23. holdi napon (október 10. – november 8.) a Jütu 2 egy 30 cm-es sziklát vizsgált. A 25. holdi nap (2020. december 9. - 2021. január 7.) végén elérkezett a leszállás második évfordulója, a rover által összesen megtett távolság pedig elérte a 600.55 métert. A 26. holdi napon (2021. január 8. - február 5.) a rover kamerái egy szokatlan, talajból kiálló, megnyúlt köre lettek figyelmesek, ami leginkább egy útjelző kőre hasonlított. A Jütu 2 megvizsgálta a követ a VNIS műszerrel. Az alakjából arra következtettek a szakemberek, hogy egy viszonylag fiatal kőről van szó, ami egy közeli becsapódás során dobódhatott ki a felszín anyagából. 2021. szeptember 28-án mindkét űreszköz, a Csang’o 4 és a Jütu 2 is elérte az 1000 napos élettartamot. A Yutu 2 eddig 839,37 métert tett meg és 3 632,01 gigabyte adatot továbbított a Földre. Novemberben, a 36. holdi nap során, a rover felfedezett egy kockaszerű objektumot nagyjából 80 méterre az északi látóhatáron és megindult felé. Az objektum egy nagy szikla lehet, amit egy becsapódás szakított ki a felszínből korábban.

Látkép a Von Kármán-kráter felszínéről 2020 novemberében.
Forrás: CNSA/CLEP

Az útjelző kő.
Forrás: CNSA
A Jütu 2 által a 3 éves holdi tartózkodás alatt összegyűjtött adatok alapján a következőket sikerült eddig megállapítani. A Csang’o 4 leszállóhelyének környezetét beborítja a 135 km-re északkeletre lévő Finsen-kráter keletkezésekor kidobódott anyag, amelyben lehetnek a holdi köpenyből származó kőzetek is. Az első két holdi nap adatai alapján több jól elkülöníthető réteget találtak a Von Kármán-kráter felszíne alatt. Ezek közül a legfelső réteg nagyjából egyöntetűen regolitból áll - amelybe elvétve nagyobb szikla ágyazódnak be - és 11 - 12 méter mélységig nyúlik le. Az alatta húzódó középső réteg, ami 24 - 25 méteres mélységig ér le, durvább szemcséjű anyagokat és nagyobb számú beágyazott kőzetet tartalmaz. Az átmeneti rétegben átlagosan egy-két 20 - 30 cm-es szikla helyezkedik el négyzetméterenként. A harmadik réteg durva- és finomszemcsés anyagok váltakozó sávjait, valamint beágyazott kőzeteket tartalmaz 40 méter mélységig. A talajradar mérései alapján a regolit idős. Mélyebben a felszín alá tekintve, nagyjából 52 méteres mélységben több különálló bazalt réteg kezdődik. Az első 52 és 63 méter, a második 63 és 96 méter, a harmadik 96 és 130 méter, a negyedik pedig 130 és 226 méter közötti mélységben helyezkedik el. Legutóbbiban bazalt mellett már felfedezhető az a kidobott anyag, amit a Késői Nagy Bombázásban becsapódó meteorok vájtak ki a felszínből nagyjából 4 milliárd évvel ezelőtt. Az ez alatti réteget pedig teljes mértékben a fent említett kidobódási anyag tölti ki. A többféle, jól elkülöníthető bazalt réteg az egykor több hullámban végbemenő vulkanikus tevékenységről árulkodik. Az ötödik és a tízedik holdi nap során bejárt útvonalon végzett talajradar mérések alapján egy a felszín alatt lévő eltemetett kráterre bukkant a rover. A kráter nagyjából 84 méter átmérőjű, pereme a felszínen feneke pedig 26 méter mélységben van. A krátert nagy valószínűséggel összeolvadt törmelékkövek, azaz breccsák töltik ki és regolit fedi el. A krátert feltöltő anyag valószínűleg a Finsen-krátert kialakító becsapódás által kidobott anyaga lehet. Az LDN adatai szerint 60 μSv sugárzás éri a Hold felszínét óránként, ami 200-szor akkora érték, mint ami egy Föld felszínén élő embert ér és 2,6-szor akkora, mint ami a Nemzetközi Űrállomáson tartózkodó asztronautákat éri. A sugárzás 75 % galaktikus kozmikus sugárzásból tevődik össze, ami a Naprendszeren kívülről érkezik. A méréseknél figyelembe kell venni, hogy a 11 évenként változó napciklus gyengébb periódusában készültek, így amikor a naptevékenység a maximumon van ennél több sugárzás éri a Hold felszínét is. Az első három holdi nap során végzett VNIS mérések adatai szerint a felszíni anyag 55,9 %-a törmelékkő, 13,5 %-a piroxén, 13,6 %-a plagioklász és 1,4 %-a olivin.
Miközben a kínai űrhivatal holdprogramja egyre nagyobb sikereket ért el, egy másik ázsiai nagyhatalom, India is szemet vetett a Holdra. Kínához hasonlóan India is az 1970-es években lépet be az űrnagyhatalmak táborába. Az ISRO indiai űrhivatal (Indian Space Research Organisation) első műholdja, az Aryabhatta 1975. április 19-én még szovjet segítséggel startolt a Bajkonuri űrközpontból. Öt évvel később azonban már az ISRO az indiai Sriharikota szigeten lévő Satish Dhawan Űrközpontból indította el az első indiai gyártású SLV-3-E2 hordozórakétát, amely egy földmegfigyelő műholdat, a Rohini RS 1 juttatta sikeresen Föld körüli pályára. India 2008-ban jelentette be, hogy holdszonda programot indít Chandrayaan néven, ami szanszkritul holdi hajót jelent. A kínai holdprogramhoz hasonlóan a Chandrayaan programot is több fázisra bontották szét. Az első fázisban egy keringőegységet és egy holdba csapódó szondát szerettek volna eljuttatni égi kísérőnkhöz, ez lett a Chandrayaan 1. Chandrayaan 1 szerkezetileg Kalpansat meteorológiai műholdon alapult. Az üzemanyag nélkül 525 kg tömegű, 1,5 méteres él hosszúságú négyzetes űrszonda energiáját napelemek állították elő, amelyet lítium ion akkumulátorok tároltak. Az űrszondát 2008. október 22-én indították a Satish Dhawan Űrközpontból egy PSLV hordozórakétával. A Chandrayaan 1 2008. november 8. és 2009. augusztus 29. között 400 kört tett meg sikeresen a Hold körül 100 km magasságban és műszereivel folyamatosan tanulmányozta az égitestet. Az űrszonda legnagyobb eredménye az volt, hogy kimutatta hidrogén-oxigén kémiai kötések jelenlétét a Holdon, ami víz molekulákra vagy hidroxid-ionokra utal. Mérései azt is megállapították a déli pólus felé haladva e kötések előfordulási száma növekszik. A mérések eredményeit a Holdba csapódó űrszonda rész műszerei is megerősítették. A sikeres első fázis után a következő űrszonda elé már egy sokkal ambiciózusabb programot tűztek ki az indiai szakemberek; egy keringőegység eljuttatását Hold körüli pályára, valamint egy leszállóegység és egy kisméretű rover eljuttatását a felszínre. A misszió feladatainak a következőket tűzték ki; a Hold keletkezésével kapcsolatos információk gyűjtése, víz molekulák utáni kutatás a Hold felszínén, a Hold felszínének feltérképezése és 3D térképek megalkotása, elektronsűrűség mérése a holdi ionoszférában és a holdfelszín kémiai összetételének meghatározása.

A Pragyan rover és szállítóeszköze, a Vikram leszállóegység szerelés közben.
Forrás: ISRO
Eredetileg az ISRO a Roskosmos orosz űrhivatallal közösen tervezte megvalósítani a Chandrayaan 2 missziót és még 2013-ban szerették volna útnak indítani azt. Már véglegesítették a Chandrayaan 2 terveit és műszereit, valamint megindult a prototípusok legyártása is, amikor a 2011-es Phobos-Grunt űrszonda kudarca lelassította az orosz űrterveket és Oroszország pénzügyi gondokra hivatkozva kiszállt a projektből. Ettől kezdve India egyedül folytatta a Chandrayaan 2 megvalósítását. Emiatt a program sok halasztást szenvedett és végül csak 2019-ben sikerült eljutni a megvalósításig. A leszálló egység és a rover külön neveket kaptak. Előbbit Vikram-nak keresztelték el Dr. Vikram Ambala Sarabhai fizikus, csillagász és egyben az indiai űrprogram atyja után, míg utóbbit Pragyan-nak nevezték el, amely a szanszkrit nyelvben bölcsességet jelent. A Vikram és Pragyan leszállási zónájának egy olyan területet jelöltek ki, amely közel fekszik a Hold déli pólusához. A déli pólus közelében az állandóan sötétben lévő kráterekben a szakemberek szerint nagymennyiségű vízjég fordulhat elő. Ezek a hidegcsapdák emellett érdekes bepillantást engedhetnek a fiatal Naprendszer történetébe. Éppen ezért az elsődleges leszállóhelynek a Manzinus C és a Simpelius N kráterek között elterülő felföldet jelölték ki. A kráterek a déli szélesség 70,9 ° és keleti hosszúság 22,7 ° koordinátájú pont közelében, a Hold déli pólusától 600 km-re helyezkednek el. Az űrkutatás történetében ez volt az első eset, hogy egy Holdra induló űrszonda leszállóhelyének egy ennyire délen lévő pontot jelöljenek ki. Tartalék leszállási zónának a déli szélesség 67,7 ° és nyugati hosszúság 18,4 ° koordinátájú területet választották ki. Felépítését tekintve a Chandrayaan 2 keringőegysége nagyon hasonló az előd Chandrayaan 1-hez, de nagyobb méretű volt annál. A négyszögletű űrszonda tetejéhez kapcsolták hozzá a Vikram leszállóegységet és a Pragyan rovert. A Holdat a keringőegység hajtóművének segítségével éri el az űrszonda. A misszió során a keringő egység az indiai Indian Deep Space Network (IDSN) követőhálózat segítségével kommunikál az irányító központtal. A Holdat elérve egy stabil 100 km magasságú pályára áll majd és onnan végzi a megfigyelését. A napelemeinek energiatermelése 1000 W. A Chandrayaan 2 keringőegységét 7 éves élettartamra tervezték. A Vikram téglalap alakú testéhez négy leszálló talap és két kinyitható, összesen 650 W teljesítményű oldalsó napelem szárny kapcsolódott. A keringő egység tömege 2 379 kg, a Vikram-é 1471 kg volt. A Pragyan volt az indiai űrhivatal első bolygókutató roverje. Felépítését és méreteit tekintve egy kisméretű, hatkerekű jármű volt, testét egy lapos téglalap alakú doboz alkotta, itt helyezkedtek el a vezérlési, a navigációs és a kommunikációs rendszer berendezései, valamint az akkumulátorok. A dobozt aranyszínű borítással látták el, amely megakadályozza a berendezések által termelt hő kisugárzását az űrbe, illetve megvédi a belső berendezéseket a külső hidegtől. A rover tömege 27 kg volt, energiáját a tetejére szerelt 50 W teljesítményű kinyitható napelem panel biztosította. Futóműve rocker-boogie elrendezésű volt. A leszálló egységet és a rovert is 14 földi napos, vagyis egy holdi nappalnyi élettartamara tervezték. Az éjszaka beálltával mindkettő beszüntette volna a működését, mert nem voltak ellátva megfelelő hő védelemmel, amivel túlélhetnék a -190°C-os hideget. A rovert félautonóm irányító rendszerrel szerelték fel és körülbelül 500 méter megtételére volt képes. Csak a Vikram-on keresztül tudott kommunikálni a keringőegységgel és a Földdel.
A keringőegység nyolc darab tudományos műszerrel volt felszerelve. A Terrain Mapping Camera 2 (TMC-2), két kamerából álló, felszínt letapogató rendszer, amely 3D-os térképet készít a Hold felszínéről. Elődje már repült a Chandrayaan 1-en. A Collimated Large Array Soft X-ray Spectrometer (CLASS) egy ásványi eloszlást feltérképező röntgen spektrométer. Elődje a CIXS a Chandrayaan 1-en már repült. A Solar X-ray Monitor (XSM) a napból érkező röntgensugárzást érzékeli 1 - 15 keV tartományban. A Chandra's Atmospheric Composition Explorer (ChACE-2) egy tömeg spektrométer. Elődje, CHACE néven, már repült a Chandrayaan 1-en. A Synthetic Aperture Radar (SAR) egy felszínt pásztázó feltérképező radar, ami a Chandrayaan-1 MiniSAR berendezése alapján készült. A Imaging Infra-Red Spectrometer (IIRS) egy infravörös spektrométer, amely a víz molekulák és a hidroxid-ionok előfordulását vizsgálja a felszínen. A Orbiter High Resolution Camera (OHRC) egy nagyfelbontású kamera, amellyel a felszínt és a leszállási zónát lehet tanulmányozni. A Dual Frequency Radio Science (DFRS) kísérlet a keringőegység és holdfelszín közötti kommunikációs csatorna segítségével vizsgálja az elektronsűrűséget a holdi ionoszférában. Ezen felül a leszállóegység további négy műszert vitt magával. Az Instrument for Lunar Seismic Activity (ILSA) a Holdon bekövetkező szeizmikus rezgéseket észleli. A Chandra's Surface Thermophysical Experiment (ChaSTE) a felszín termikus viszonyait vizsgálja 10 cm mélységig. Radio Anatomy of Moon Bound Hypersensitive ionosphere and Atmosphere (RAMBHA) a felszín plazma sűrűségét vizsgálja. Az LRA nevű lézerreflektor a NASA jóvoltából került a Vikram műszerei közé. A roveren további két műszert helyeztek el; a Laser-Induced Breakdown Spectroscope (LIBS) lézer indukciós spektrométert és Alpha Particle X-Ray Spectrometer (APXS) röntgen spektrométert. Mindkettő a felszín anyagösszetételét vizsgálja. A LIBS nagyenergiájú lézernyalábot lő ki a vizsgált mintára és elemzi a keletkező plazma által kibocsátott sugárzást. Az APXS alfa részecskékkel és röntgensugarakkal bombázza az adott mintát és vizsgálja a benne a bombázás hatására keletkező sugárzást. A műszerek a lézerreflektor kivételével, mind Indiában készültek. 142 millió dolláros kifejlesztési költségével a Chandrayaan 2 lett a legkisebb költségvetésű holdmisszió az űrhajózás történetében.

2019. július 22-én helyi idő szerint délután 2:43-kor a Chandrayaan 2 űrszonda, a Vikram leszállóegység és a Pragyan rover
elindulnak a Satish Dhawan Űrközpontból a Hold felé egy GSLV Mark III-M1 háromfokozatú hordozórakéta tetején.
Forrás: ISRO
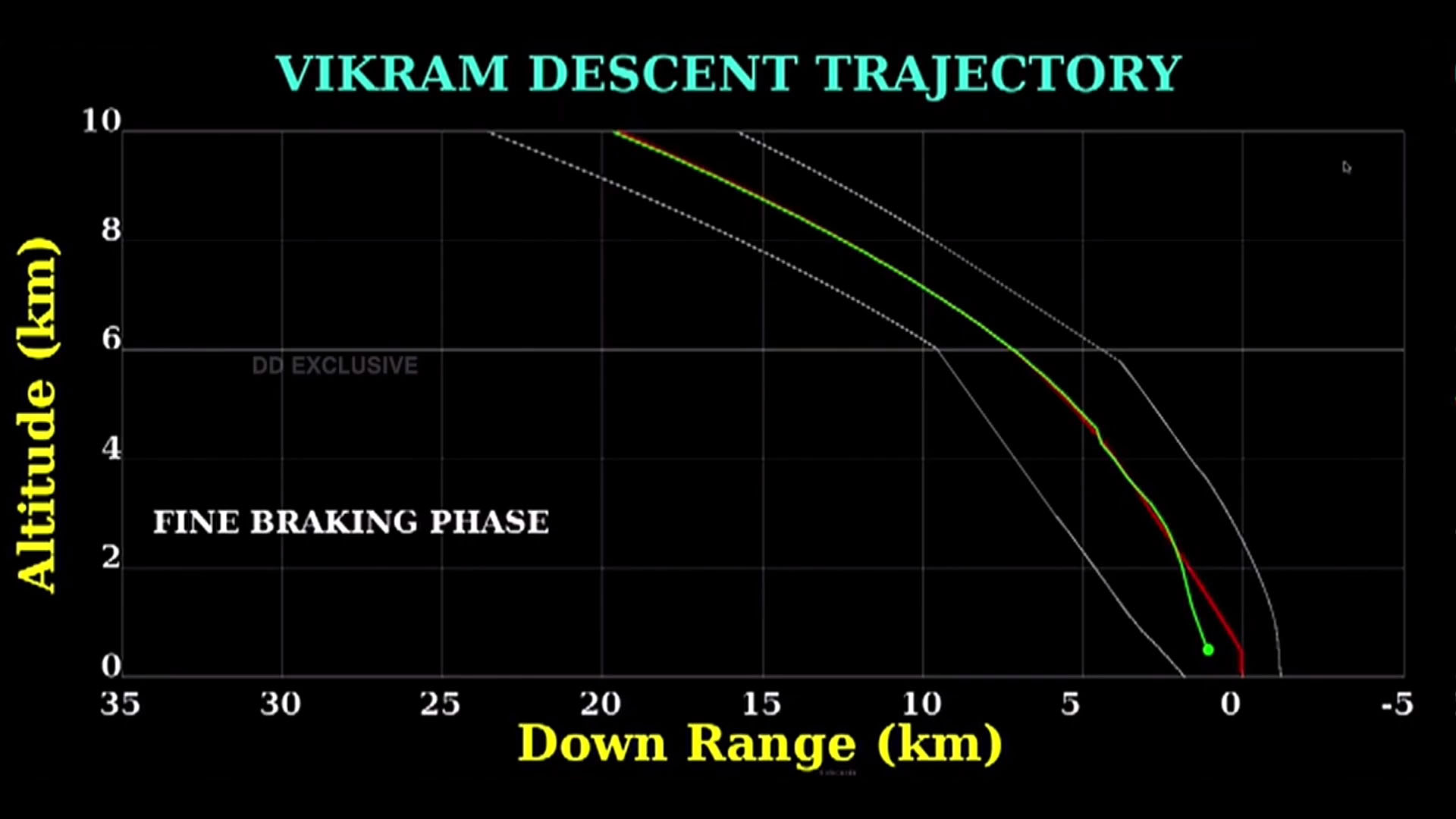
A Vikram és a Pragyan landolásának magasság - vízszintes távolság grafikonja. 2,1 km magassági minden rendszer
megfelelően működött és a leszállás a tervek szerint haladt. Az irányító központ 330 méter magasságig vette a Vikram jeleit, ekkor
a leszállóegység már vízszintesen 1 km eltérésben volt a tervezett talajérési ponttól.
ISRO
A Chandrayaan 2 indítását eredetileg 2019. július 14-re tűzték ki, de a hordozórakétában fellépő technikai problémák miatt a startot egy órával a kezdete előtt lefújták. A következő időpontban már minden a tervek szerint ment és a Chandrayaan 2 egy GSLV Mark III-M1 (Geosynchronous Satellite Launch Vehicle-Mark III) háromfokozatú hordozórakéta tetején július 22-én helyi idő szerint délután 2:43-kor felemelkedett a Satish Dhawan Űrközpontból. Az űrszonda útja a Holdig a kisebb teljesítményű hajtóművek miatt a korábbi űreszközökhöz képest sokkal lassabbra sikeredett. A Föld körüli pálya magasságát folyamatosan növelve az űreszköz július 22. és augusztus 13. között spirális vonalban távolodott a bolygótól. A Hold felé való transzfer pályára álláshoz szükséges 1 203 másodpercig tartó gyújtásra, a TLI-re, augusztus 14-én indiai idő szerint hajnali 2:21-kor került sor. A Chandrayaan 2 hat nap múlva érte el a Hold térségét és augusztus 20-án világidő szerint 3:32-kor egy 1 738 másodpercig tartó fékező gyújtással Hold körüli poláris pályára állt. Augusztus 20. és szeptember 2. között öt pályamódosítást hajtottak végre a déli pólushoz vezető leszállási pálya finomításához, eközben az űreszköz egyre közelebb került a Hold felszínéhez. Szeptember 2-án világidő szerint 7:45-kor levált a Vikram leszállóegység a Chandrayaan 2-ről és megkezdte az ereszkedést a felszín felé. A leszállás során 100 km magasságban kezdődött meg az intenzív fékezés szakasza, amely során a Vikram mind a négy hajtóművével fékezett és a Lander Position Detection Camera (LPDC) akadályok után kutatva átvizsgálta a leszállási zóna felszínét a biztonságos leszállás érdekében. 400 méter magasságban két hajtómű működtetésével a Vikram átváltott lebegésbe. Az utolsó szakasz a központi hajtóművel végrehajtott finom landolás lett volna. A tervek szerint a sikeres landolás után négy órával a Vikram kihelyezi a felszínre a Pragyan-t. A rover után pedig a ChaSTE, a RAMBHA és az ILSA mérőberendezések beüzemelése történik meg. A teljes landolás a tervek szerint 15 percig tartott volna és a leszállóegységnek a roverrel együtt szeptember 6-án 20:00 körül (világidő) kellett volna elérnie a felszínt. Szeptember 6-án 20:48-kor (világidő) K. Sivan, az ISRO vezetője bejelentette, hogy elvesztették a kapcsolatot a leszálló egységgel. 2,1 km magassági minden rendszer megfelelően működött és a leszállás a tervek szerint haladt. 330 méter magasságban még vették a Vikram jeleit. A kapcsolat megszakadásakor a leszállóegység vízszintesen 1 km eltérésben volt a tervezett talajérési ponttól. Narendra Modi indiai miniszterelnök a tervezett leszállás előtt fél órával érkezett meg a bengaluru-i követőállomáshoz, így a helyszínről nézhette végig a leszállóegység eltűnését. Szeptember 8-án bejelentették, hogy a Chandrayaan 2 kamerái megtalálták a Vikramot, de továbbra sem tudták felvenni vele a kapcsolatot. Szeptember 19-én lement a nap a leszálló hely fölött, ezért a további kapcsolatteremtési próbálkozásokkal felhagytak. Az ISRO az űreszközök megtalálásá érdekében a NASA-hoz fordult segítségért. A NASA Lunar Reconnaissance Orbiter űrszondájának a leszállási terület fölötti szeptember 7-ei átrepülése még nem hozott eredményt. November 11-én azonban az űrszonda észlelte a Vikram és Pragyan leszállási helyén lévő törmelék mezőt és becsapódási nyomot. A becsapódás ereje felszakította a regolitot, a Hold felszínén lévő porréteget. Ezzel igazolást nyert a Vikram és a Pragyan balszerencsés sorsa. Jitendra Singh az Indiai Űrkutatásért Felelős Minisztérium vezetőjének novemberi bejelentése szerint hiba történt a fékező rakéták tolóerő szabályozó rendszerében, emiatt a Vikram nem lassult le kellőképpen és becsapódott a Hold felszínébe. A leszállóegység és a rover balszerencséjének ellenére ISRO 90-95 %-ban sikeresnek értékelte a küldetést. A Chandrayaan 2 keringőegysége továbbra is tökéletesen működik és 7 évre elegendő üzemanyaggal van ellátva, hogy folyamatosan tanulmányozhassa műszereivel a Holdat. India pedig nem adta fel azt az álmát, hogy saját gyártású rovert juttasson a Hold felszínére. Az ország Egyesült Királyságtól való elszakadásának és a függetlenség kinyilvánításának 75. évfordulója tiszteletére az ISRO a Chandrayaan 3 küldetésével szeretné végrehajtani az első sikeres indiai holdraszállását és az első roverjének felszínre juttatását 2022 öszén.
- India's Chandrayaan-2 moon mission hits 1-year mark in lunar orbit
- Big New Indian Rocket Launches Satellite, Setting Stage for Moon Mission
- Chandrayaan-2: India's Orbiter-Lander-Rover Mission
- India Is Officially Going Back to the Moon with Chandrayaan-3 Lunar Lander
- India's Chandrayaan-2 Moon Orbiter Releases Vikram Lunar Lander
- At the Moon, India's Chandrayaan-2 Spacecraft Poised to Release Lunar Lander
- India Readies Chandrayaan-2 Moon Mission for July Launch
- Here's Where India's Chandrayaan-2 Will Land Near the Moon's South Pole (and Why)
- India Delays Chandrayaan-2 Moon Lander Launch Over 'Technical Snag'
- India's Chandrayaan-2 Spacecraft Snaps Its First Picture of the Moon
- India Gearing Up to Launch 2nd Moon Mission This Weekend
- US Moon Landing Hopefuls Watch Silent India Lander — and Learn
- Time Is Running Out for India to Save Its Silent Moon Lander
- India Shoots for the Moon with Ambitious Lunar Launch Today! Watch It Live
- India Will Launch an Ambitious Moon Orbiter-Lander-Rover Combo in July
- Stunning Photos Show Earth from India's Spacecraft Headed to the Moon
- A NASA Spacecraft Still Hasn't Spotted India's Ill-Fated Moon Lander
- Liftoff! India Launches Ambitious Mission to Land at the Moon's South Pole
- India Loses Contact with Vikram Lander During Historic Moon Landing Attempt
- See How India's Moon Lander Will Reach the Lunar Surface (Video)
- How India's moon crash wasn't really a failure (op-ed)
- 'We Came Very Close:' Indian Prime Minister Modi Lauds Chandrayaan-2 Team After Moon Lander Goes Silent
- Chandrayaan-1: India's First Mission to the Moon
- China Launches Chang’e 3 on Country’s First Mission to Land on the Moon
- India Just Found Its Lost Vikram Lander on the Moon, Still No Signal
- India's Chandrayaan-2 Moon Mission Successfully Enters Lunar Orbit
- India to Launch Chandrayaan-2 Moon Lander Mission July 22
- India's Chandrayaan-2 Spacecraft Leaves Earth Behind for Trip to the Moon
- The Science of India's Chandrayaan-2 Mission to the Moon's South Pole
- NASA spacecraft reveals travels of China's Yutu 2 rover on far side of the moon
- China's Yutu 2 rover finds 'milestone' on far side of the moon
- China's Yutu 2 rover about to 'wake up' on the far side of the moon
- China’s Jade Rabbit Hops Across Lunar Surface Following Country’s First Moon Landing
- NASA/Chang'e 3 Rover
- NASA Science Solar System Exploration/Missins/Yutu
- Most Chang'e-3 science tools activated
- Lander and rover ready to perform exploration tasks
- Chang'e 3 update with lots of pictures: Yutu begins lunar journey
- Chinese rover hibernating to survive frigid lunar night
- Moon rover Yutu sleeps as night comes
- China's moon rover flexes muscles
- Chinese moon lander and rover wake up after weeks of sleep
- China's Jade Rabbit rover explores Moon soil
- China's moon rover, Jade Rabbit, has 'abnormality': state media
- Bad news for Yutu rover
- China's imperiled Jade Rabbit moon rover: 'Goodnight, humanity'
- Beijing, we have a problem: China's first lunar rover, Jade Rabbit, signs off
- China Moon rover Jade Rabbit in trouble
- China Exclusive: Control circuit malfunction troubles China's Yutu
- Brief Yutu update: Slightly more detail on what's keeping rover from roving
- China's Jade Rabbit lunar rover 'could be saved'
- It's alive! Welcome back, Jade Rabbit
- Possible hope for Yutu: "Situation is getting better," but no details [UPDATED]
- Down but not out: Jade Rabbit comes back from the dead
- China Moon rover Jade Rabbit in trouble
- China Exclusive: Control circuit malfunction troubles China's Yutu
- Yutu Moon Rover Starts 3rd Night Time Hibernation But Technical Problems Persist
- China Focus: Uneasy rest begins for China's troubled Yutu rover
- Chinese Yutu Moon Rover pronounced Dead after record-setting Mission
- China's Yutu rover is still alive, reports say, as lunar panorama released
- Last-ditch efforts to salvage mission of China's stricken Jade Rabbit lunar rover
- Chinese lunar rover alive but weak
- Yutu still working after expected service span ended
- Chinese lunar rover alive but weak
- China's ailing moon rover weakening: designer
- China's moon rover Yutu functioning but stationary
- China's Jade Rabbit moon rover dead after 31 months on surface
- China’s Yutu rover dies on the moon
- Chinese scientists reveal analysis of weird substance found on the moon's far side by Yutu 2 rover
- China's Yutu 2 rover snaps stunning new panoramas from the moon's far side
- China's Chang'e 4 Completes 10 Lunar Days on Far Side of the Moon
- Here's What China's Yutu 2 Rover Found on the Far Side of the Moon (Photos)
- What Lies Below the Moon's Crust? China's Yutu-2 Rover May Be the First to Find Out.
- Chang'e-4 Begins Lunar Day 7 After Yutu-2 Rover Overcomes Cosmic Challenges
- China's Yutu 2 Rover Is Driving on the Far Side of the Moon
- Chang'e 4 Spacecraft Enter 3rd Lunar Night, Yutu 2 Hits Design Lifetime
- China's Chang'e 4 Moon Lander, Yutu 2 Rover Awake for 4th Lunar Workday
- China's Chang'e 4 lander and rover awake once more on far side of the moon
- China's moon mission robots wake up for a 23rd lunar day as team snags major award
- This is the rover China will send to the 'dark side' of the moon
- China’s Chang’e 4 spacecraft to try historic landing on far side of moon ‘between January 1 and 3’
- China's latest Moon mission costs about as much as building 1 km of subway
- Chinese Lunar Probe, Chang’e-4, Goes Standby Mode For The Second Lunar Night on The Dark Side of The Moon
- China's Farside Moon Rover Breaks Lunar Longevity Record
- 1,000 days on the moon! China's Chang'e 4 lunar far side mission hits big milestone
- Chang'e-4: Far side of the Moon lander and rover mission to launch in December
- China lands Chang’e-4 mission on the far side of the Moon
- How China's lunar relay satellite arrived in its final orbit
- Chang’e-4 powers down for second lunar night
- China's Chang'e 4 lander and rover complete 15th lunar day on moon's far side
- Chinese moon rover peers beneath surface of mysterious lunar far side
- We now know exactly how much radiation astronauts will face on the moon
- China lifts off in pioneering journey to the far side of the moon
- Here's what you need to know about China's Chang'e-4 relay satellite launch
- On Far Side of the Moon, Chinese Lander and Rover Hit One-Year Mark
- Compositional variations along the route of Chang’e-3 Yutu rover revealed by the lunar penetrating radar
- Velocity Analysis Using Separated Diffractions for Lunar Penetrating Radar Obtained by Yutu-2 Rover
- MINERAL ABUNDANCE AND PARTICLE SIZE DISTRIBUTION DERIVED FROM IN-SITU SPECTRA MEASUREMENTS OF YUTU ROVER OF CHANG’E-3
- Self-Organization Characteristics of Lunar Regolith Inferred by Yutu-2 Lunar Penetrating Radar
- Yutu-2 Radar Sounding Evidence of a Buried Crater at Chang’E-4 Landing Site
- Olivine-norite rock detected by the lunar rover Yutu-2 likely crystallized from the SPA impact melt pool
- First look by the Yutu-2 rover at the deep subsurface structure at the lunar farside
- Wikipédia/Pánkromatikus film
- The scientific objectives and payloads of Chang’E_4 mission
- IMPLEMENTATION STRATEGY OF VISIBLE AND NEAR-INFRARED IMAGING SPECTROMETER ON YUTU-2 ROVER BASED ON VISION MEASUREMENT TECHNOLOGY
- COMPUTER VISION IN THE TELEOPERATION OF THE YUTU-2 ROVER
- China says it will launch 2 robots to the far side of the moon in December on an unprecedented lunar exploration mission
- NASA/Chang'e 4
- Chandrayaan-2: A Memorable Mission Conducted by ISRO
- China's Yutu 2 rover spots cube-shaped 'mystery hut' on far side of the moon
Kapcsolódó írások
Kerekeken a Naprendszerben 1.
A Lunohod holdjárók
Kerekeken a Naprendszerben 7.
A Curiosity 2. rész